Ich will einen
Drehzahlmesser für meine brushless-Motoren!

Es ist nicht so, dass ich mir noch keine gekauft
hätte; im Gegenteil. Die meisten funktionieren
optoelektronisch und messen die Änderungen des
Lichteinfalls, wenn ein Propellerblatt vorbeihuscht.
Reproduzierbare und stabile Messwerte habe ich
allerdings selten erhalten. Bei bürstenlosen Motoren
gibt es noch eine andere Möglichkeit: Die Drehzahl
wird ermittelt, indem die Signale an den
Motoranschlüssen ausgewertet werden. Daher auch der
Name eRpmMeter (eRpm = electrical revolutions per
minute).Beim Chinesen des geringsten Misstrauens habe ich dann den "Hobbywing Brushless RPM Sensor" gesehen. In der Hoffnung, dass das Teil verwertbare Signale ausspuckt, habe ich die fälligen 2,63 Euro investiert. Nach vier Wochen war klar: Da kommt ein astreines Rechtecksignal raus, dessen Frequenz der Drehzahl entspricht.
 Am Ende der
Überlegungen, wie daraus ein Drehzahlmesser
entstehen könnte war die Idee geboren, eine
besonders nachbaufreundliche Konstruktion zu
schaffen. Das ganze Konstrukt besteht aus fertig
kaufbaren Modulen die nur noch elektrisch
miteinander verbunden werden müssen. Lediglich eine
handvoll Lötstellen sind erforderlich, um ein
funktionsfähiges Gerät zu erhalten.
Am Ende der
Überlegungen, wie daraus ein Drehzahlmesser
entstehen könnte war die Idee geboren, eine
besonders nachbaufreundliche Konstruktion zu
schaffen. Das ganze Konstrukt besteht aus fertig
kaufbaren Modulen die nur noch elektrisch
miteinander verbunden werden müssen. Lediglich eine
handvoll Lötstellen sind erforderlich, um ein
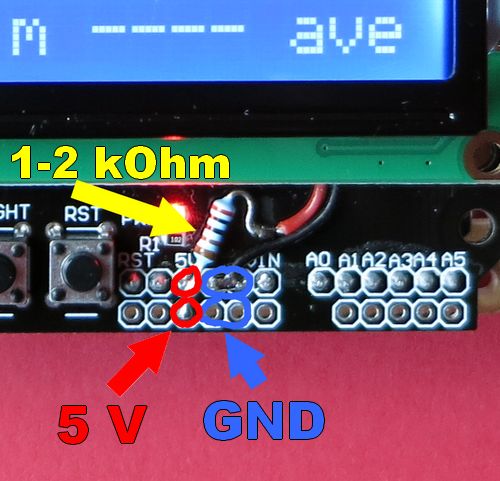
funktionsfähiges Gerät zu erhalten.Basis ist ein Arduino UNO. Das ist eine Platine, auf dem ein AVR-Mikrocontroller werkelt. In diesen muss eine Firmware geladen werden. Das läuft über den USB-Anschluss eines Windows-Computers. Ich habe versucht alles so vorzubereiten, dass keine Vorkenntnisse erforderlich sind.